Unterschied zwischen präventiven und nicht preemptiven Planung im Betriebssystem
Schlüsselunterschied - Präventiv vs nicht preemptive Planung in Betriebssystem
Ein Prozess ist ein Programm in der Ausführung. Ein Computer sollte viele Aufgaben gleichzeitig ausführen. Daher sollte die CPU Prozesse erhalten und ausführen. Manchmal ist es notwendig, einige Prozesse auszuführen als die anderen Prozesse. Zu diesem Zeitpunkt wird der laufende Prozess unterbrochen und CPU wird dem neuen Prozess zugewiesen. Nachdem die Aufgabe abgeschlossen ist, wird die CPU dem vorherigen Prozess zurückgelegt. Die Planung nach diesem Mechanismus wird als präventive Planung bezeichnet. Wenn der laufende Prozess nicht unterbrochen werden kann und es obligatorisch ist, den laufenden Prozess auszuführen, wird er als nicht preemptive Planung bezeichnet. In diesem Artikel wird der Unterschied zwischen der präventiven und nicht preemptiven Planung in einem Betriebssystem erörtert. Die präventive Planung ist der Prozessplanungsmechanismus, durch den ein Prozess, der durch einen anderen Prozess in der Mitte seiner Ausführung unterbrochen werden kann, unterbrochen werden kann. Die nicht vorbeugende Planung ist der Prozessplanungsmechanismus, über den ein Prozess erst nach dem vorherigen Prozess beendet wird. Das ist das Schlüsselunterschied zwischen Präventive und nicht vorbeugende Planung in Betriebssystem.
INHALT
1. Überblick und wichtiger Unterschied
2. Was ist die präventive Planung in Betriebssystem
3. Was ist nicht vorbeugende Planung in Betriebssystem
4. Ähnlichkeiten zwischen präventiven und nicht preemptiven Planungen im Betriebssystem
5. Seite an Seitenvergleich - präventive gegen nicht vorbeugende Planung in OS in tabellarischer Form
6. Zusammenfassung
Was ist die präventive Planung in Betriebssystem?
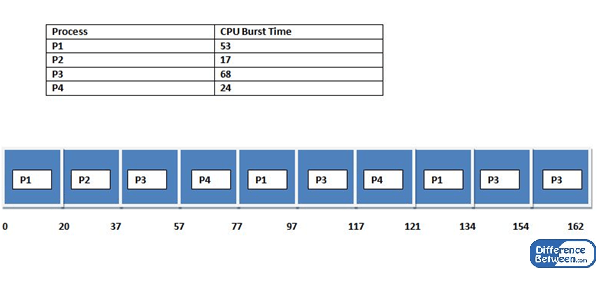
Die Round -Robin -Planung ist ein Beispiel für die präventive Planung. Jeder Prozess erhält eine kleine Menge CPU -Zeit. Es sind normalerweise 10 bis 100 Millisekunden. Diese kleine Dateneinheit wird auch als Zeitquantum bezeichnet. Nach dieser Zeit ist der Prozess verstrichen und bis zum Ende der Ready -Warteschlange hinzugefügt. Angenommen, es gibt 4 Prozesse wie P1, P2, P3 und P4. Die CPU -Burstzeiten in Millisekunden sind wie folgt. Das Zeitquantum beträgt 20.
Abbildung 01: Beispiel für die runde Robinplanung
Der P1 -Prozess wird bis 20 ausgeführt. Es sind noch 33 ms übrig. Dann führt der P2 aus. Da das Zeitquantum 20 beträgt und die erforderliche Zeit P2 17 ms beträgt, wird P2 für 17 ms ausgeführt. Der P2 -Prozess ist also abgeschlossen. Dann wird P3 die Chance gegeben. Es wird für 20 ms ausgeführt. Der Rest ist 48 ms. Dann wird der P4 für 20 ms ausgeführt. Es hat 4 ms, um den Gesamtprozess abzuschließen. Auch hier wird der P1 für 20 ms ausgeführt. Es hat weitere 13 ms, um den Vorgang zu beenden. Die Änderung wird an p3 gegeben. Es wird für 20 ms ausgeführt und es hat noch 28 ms, um vollständig fertig zu werden. Der P4 führt aus. Es hat nur 4 ms. Daher vervollständigt P4 die Ausführung. P2 und P4 sind bereits beendet. Die verbleibenden Prozesse sind P1 und P3. Die Chance wird P3 gegeben. Es hatte 13 ms zu vervollständigen, so dass es abgeschlossen ist. Jetzt ist der einzige verbleibende Prozess P3. Es hat 28 ms zu vervollständigen. P3 läuft also für 20 ms. Der Rest ist 8 ms. Alle anderen Prozesse haben bereits die Ausführung abgeschlossen. Daher wird der Rest von 8 ms P3 wiederum ausgeführt. Ebenso bekommt jeder Prozess die Möglichkeit, auszuführen.
Was ist nicht vorbeugende Planung in Betriebssystem?
Die Planung von FCFS (FCFS) zuerst wird als Beispiel für die nicht preemptive Planung genommen werden. Der Prozess, der zuerst Anfragen beantragt, wird zuerst der CPU zugeteilt. Diese Zeitplanung kann leicht von der ersten in First Out (FIFO) Warteschlange verwaltet werden. Wenn Prozesse als P1, P2 und P3 in Ordnung sind, wird P1 zuerst die Chance gegeben. Nach Abschluss des Abschlusses wird P2 ausgeführt. Wenn P2 abgeschlossen ist, wird der P3 ausgeführt. Angenommen, es gibt 3 Prozesse wie P1, P2 und P3 mit CPU -Burst -Zeiten in Millisekunden wie folgt.
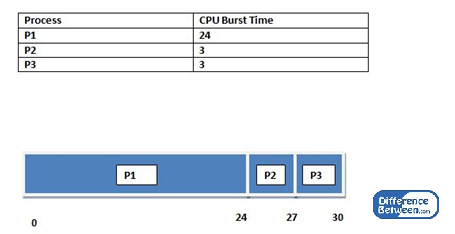
Abbildung 02: Beispiel für die FCFS -Planung
Gemäß den oben genannten wird P1 ausgeführt. Sobald es abgeschlossen ist, wird der Prozess P2 für 3 ms ausgeführt. Jetzt ist der verbleibende Prozess P3. Dann wird es ausgeführt. Die Wartezeit für P1 ist Null. Der Prozess P2 musste 24 ms warten, und der Prozess P3 musste 27 ms warten. Wenn die Prozesse in der Reihenfolge P2, P3 und P1 eintrafen, wird P2 zuerst abgeschlossen. Nächster P3 wird abgeschlossen, und schließlich wird P1 fertiggestellt.
Was ist die Ähnlichkeit zwischen Präventiv und nicht vorbeugender Planung in OS?
- Sowohl präventive als auch nicht preemptive Planung in Betriebssystem sind Mechanismen, um Prozesse in einem Computer zu planen.
Was ist der Unterschied zwischen Präventiv und nicht vorbeugender Planung in OS?
Präventive gegen nicht vorbestimmte Planung in Betriebssystem | |
| Die präventive Planung ist der Prozessplanungsmechanismus, durch den ein Prozess durch einen anderen Prozess in der Mitte seiner Ausführung unterbrochen werden kann. | Die nicht vorbeugende Planung ist der Prozessplanungsmechanismus, über den ein Prozess erst nach dem vorherigen Prozess beendet wird. |
| Prozessunterbrechung | |
| Bei der präventiven Planung können die Prozesse unterbrochen werden. | In der nicht vorbeugenden Planung können die Prozesse unterbrochen werden. |
| CPU-Auslastung | |
| Bei der präventiven Planung ist die CPU -Auslastung höher als die nicht vorbeugende Planung. | Bei der nicht vorbeugenden Planung ist die CPU -Auslastung im Vergleich zur präventiven Planung minimal. |
| Flexibilität | |
| Die präventive Planung ist flexibel. | Nicht preemptive Planung ist nicht flexibel. |
Zusammenfassung -Präventiv vs nicht preemptive Planung in Betriebssystem
Auf einem Computer werden mehrere Prozesse ausgeführt. Wenn jeder Prozess ausgeführt wird, wird die CPU diesem spezifischen Prozess zugewiesen. Manchmal ist es notwendig, die Ausführung des aktuellen Prozesses zu stoppen und einem anderen Prozess Priorität zu geben. Prozessplanungsmechanismen können präventiv oder nicht preemptiv sein. Die präventive Planung ist der Prozessplanungsmechanismus, durch den der Prozess durch einen anderen Prozess in der Mitte seiner Ausführung unterbrochen werden kann. Die nicht vorbeugende Planung ist der Prozessplanungsmechanismus, aber welcher Prozess die Ausführung erst nach dem vorherigen Prozess beginnt. Dies ist der Unterschied zwischen präventiven und nicht vorbeugender Planung in Betriebssystem.
Laden Sie die PDF von präventiven und nicht preemptiven Planungen in Betriebssystem herunter
Sie können die PDF -Version dieses Artikels herunterladen und sie für Offline -Zwecke gemäß Citation Note verwenden. Bitte laden Sie die PDF -Version hier herunter: Unterschied zwischen präventiven und nicht vorbeugender Planung im Betriebssystem
Referenz:
1.Was ist präventive und nicht vorbeugende Planung?. Hier verfügbar
2.Punkt, Tutorials. „Betriebssystemplanungsalgorithmen.”, Tutorials Punkt. 8. Januar. 2018. Hier verfügbar
3.„Was sind präventive und nicht vorbeugende Begriffe im Kontext des Betriebssystems ?”Geeksforgeeks Q & A. Hier verfügbar


